
https://www.youtube.com/watch?v=W4dTJSLot9o
Last night.
US Democrat presidential candidate Hillary Clinton with VP pick Tim Kaine (left) declines to discuss the ongoing Wikileaks revelations.
The Dangers Of Hillary Clinton (New York Times)
Meanwhile

Highlights from Republican presidential candidate Donald Trump’s speech on Saturday at Gettysburg, Philadelphia.
FIGHT!
Meanwhile…

To recap.
A comprehensive Al Jazeera report on Wikileaks, The US election and media collusion with the Clinton Campaign.
Sponsored Link


so far the wikileaks emails haven’t dampened my enthusiasm for Hillary at all, as there’s nothing unusual for a Washington politician in them. so no, it’s not solely mainstream media keeping her afloat.
assange has come out of this looking like a self-serving tool. i gave him the benefit of the doubt up to now but it’s become obvious he’s only interested in himself.
It’s interesting that Assange has dirt on Trump, but won’t release it. Gropey egomaniacs must stick together, eh?
No they are both Israeli mossad assets, that’s why wikileaks released nothing on Israel, correct though they are both rapists
This is getting a bit desperate from Bodger here now.
Bodger still banging the Wikileaks drum. It would take a lot of startling revelations to move Hillary to a worse place in my mind than where Trump is sitting right now.
Assenge is not exactly neutral in his feelings towards everyone involved, but I don’t think a Trump victory is going to get him a pardon unless there’s something further in it for Trump . . .
Clinton represents everything the left should be standing against, but instead they have been willing lead into hating Trump.
Its crazy how the cultural Marxists have been shown to be an easily manipulated mass of hive mind drones.
The swarms on here are a sad indictment on the state of the Irish discourse .
#anarchistsfortrump
Discourse… Cultural Marxists….? Look like we got ourrselves a humanities lecturer over here guys. Fear not, when ‘human’ gets around to writing their 8000 word foucauldian essay on this we will all be blissfully unaware.
reminds me of that episode of Red Dwarf where Lister met his younger self and Teenage Lister kept using the phrase “crypto-fascist”
The left wing candidate is deeply flawed so support a right-wing demagogue with the temperament of a three-year-old throwing a tantrum. You’ve thought this through.
‘Right wing demagogue’…… You really are disconnected from reality…
I’ve said this to people before: I’ll take the cold calm psychopath that looks at the situation before acting over the maniac who’s ego won’t allow him to ever think he’s wrong and will deny and attack you if you point it out. Trump has nothing in common with anarchism unless you count anarcho-capitalists who are essentially just libertarians with left wing delusions.
wow read what you just typed again and go take a long hard look in mirror.
that’s your response any time you can’t think of anything better to say. pedeyw is right.
Pedey reign in your faux outrage your not making sense anymore
“reign in your faux outrage” I’m sorry you misunderstood. I’m not outraged, I’m just expressing my personal opinion on the situation. If you you can’t see my fairly clearly expressed point, that’s really your own problem but I’ll try to be clearer: I don’t like either candidate much but it’s a binary race (more or less) and one of them much is worse.
+1 Pedeyw
-1 Pedey
I think you’re just lying.
> Left Wing
(As we now like to refer to the globalist neo-con establishment)
+1
Beg your pardon. ‘Left wing.’
How does anarchy work when voting for the other mainstream political party?
Because it’s libertarianism.
https://www.buzzfeed.com/jamesball/heres-what-i-learned-about-julian-assange?utm_term=.lajWwAQ5Ye#.lajWwAQ5Ye
Of course this is all a conspiracy and lies by someone who worked closely with Assange. But then the new Broadsheet editorial position is to support misogyny, sexual assault, racism, bigotry, etc, and blindly fall behind Assange and Trump while all around them walk away.
so to ask questions about clinton is to support trump’s misogyny and other lunacy? what sort of logic is that?
Nope. But to only ask the baseless questions posed by the Alt-Right is perhaps aligning to a questionable agenda.
They’re free to publish the wealth of questions raised about Clinton from sources that don’t support the abhorrent views of the Alt-Right. There are plenty out there. Unfortunately “mainstream media doing its job on the wiki leaks data” isn’t sexy.
At the moment it’s Trump vs Clinton. Trump is so extreme and unworthy of office that criticising Clinton is pointless right now unless you want Trump as president. I’ll criticise her as much as I like when she is president but for the moment criticising her serves no purpose other then to help Trump.
+1 two horse race innit
“Broadsheet editorial position”
LOL. As if they have editorial.
This article is a rather devastating profile of Assange by Andrew O’Hagan in the LRB.
http://www.lrb.co.uk/v36/n05/andrew-ohagan/ghosting
@ Classter I posted that link over two weeks ago. Makes for a very interesting read. The man behind the mask.
So nice to be educated so charmingly. p
Perhaps if any of us are slow to understand you could write another article on Broadsheet commenters and hope it might be featured on this site? Cos, frankly, no one’ s going to read it otherwise. Pseudopsychomanipulation might seem fun but really it’s quite obvious. Commenter tactics, appearances and disappearances are easily identifiable by other commenters and writing styles very distinctive. I can explain further but you might not want me to perhaps?
Please do.
Woman from deeply misogynistic family, intelligent enough to know better, courts professional rival to ex to wreak revenge on that ex. Piqued when her offer is declined, she decides she’s now madder at the rival than the ex, and commences a campaign to undermine his work, his contributors and readers, who, not to her knowledge being people of any importance, she alternately despises and disregards. To this end, in a nice touch of delicacy, she writes a piece for her ex about his rival and enlists the same ex (who, despite an inability to detect typos in his own work, has a habit of patronisingly commenting on rivals’ editing skills, she enlists her ex to join her in snarky commenting. When called out on this by other commenters who work out what’s happening, she first demands the other commenters be banned and then changes her username, while retaining the same identifiable writing style as her previous comments, twitter handle and day job. Oh yes, and doing all this while involved with a third unfortunate man. That’s the charitable version, and even so it reads rather creepily, don’t you think?
It does read very creepily . You seem to be living in some very confused dream. I merely use BS as a source of entertainment . You should learn to dance with humour as it may afford you some sense. Revenge, misogyny, ex, third man… jeepers that is all a bit Jackie Collins on acid!! That is not the world that I inhabit..
I enjoy BS and I enjoy the wit of some of the commenters…. (Neilo, Rotide , Ahjaysis , Caroline). Long may it continue.
You are being dishonest, and trying to ingratiate yourself with the other commenters to enlist help (just like you did before when challenged) doesn’t help. All of the above is true. The only reason I’m not naming your previous article or your ex’s publication is because he may not be aware of your full manipulation, and may not be responsible for anything more than being annoying. As far as you are concerned, however, it’s very difficult to characterise your behaviour as anything less than extremely manipulative. You hold down a job on a major newspaper. Why aren’t you focusing on that rather than someone else’s publication?
I’m going to go out on a limb and suggest that the cool persona and verbal agility projected by Coppélia requires no help from drink-soaked popinjays like me. Cheers *hic*
get a room neilo
Hi Saturday Night.I don’t work for any newspaper. You are completely wrong.I shall though take it as a compliment :) There is no manipulation on my part and there is no truth to your assumptions. It really is as simple as that. I shall leave it at that .
Coppelia, good to know you use Broadsheet as a source of entertainment and that you like the people who like your comments. But do you know anyone who writes for the site offline, like Saturday Night seems to be saying? I have an idea about the article he’s referring to, but I can’t seem to find any reference to the author anywhere else, which indicates that it may indeed have been written under a pseudonym?
There has been a lot of Bodger-baiting in the comments, that’s true. And a lot of weird complaints about ‘editorial’. And it’s correct that Rotide is editor written backwards.
Saturday Night, out of interest, what commenters are you referring to as part of this alleged strategy?
I’ve no problem with being called irritating, but keep me out of any BS comments sections dramas and conspiracies. I’ve been posting under this username since 2011 all easily traced.
I lurk and occasionally post. That’s it.
I’ve always been annoying. Occasionally irritating. Never politically affiliated and have no idea who anyone is on here apart from recognising a few usernames from the old days.
I’ll happily debate anything about my own views and even take criticism, but please, don’t drag my name the comment section soap opera.
@The Lady Vanishes: While it may be a useful shorthand for the Trot McCarthyism that plagues Broadsheet, I’m not a Fine Gael supporter. I like Varadkar and would rather offer my preferences to centrist parties. Every Irish political party, regardless of its supposed ideological basis, is obsessed with rewarding public employees and Peronist levels of social transfers. Both of these are funded by an unsustainable combination of high taxation and borrowing.
Neilo, thanks for sharing your political views, funny you come in here (as I didn’t mention you), my comment above was talking about J/Coppelia/Rotide/Owen C, unless you’re the same as any of the above why would whether or not you are FG matter?
@The Lady Vanishes:
[i}’If you scroll down you’ll see J says, when challenged about something that didn’t make sense to me at the time but possible more so in the context of what you’ve written above, that she finds Broadsheet informative and some of the commenters (the same ones as those mentioned by Coppelia above) entertaining, lovely etc.
Neilo who has come into the discussion above is one of those mentioned.'[/i]
I commented in reply to your mention of me in the post above.
Yes, you were mentioned in a quote from J/Coppelia twice
On both occasions, using almost exactly the same words, under different user names, on different threads, she referenced you and some other commenters as commenters she liked.
I think you jumped in just after her most recent mention to praise her wit and way with words.
But quoting from J is not the same thing as saying you were Fine Gael, in fact I specifically referenced the commenters I said were FG or FG linked (doesn’t necessarily mean they support Kenny) and you weren’t included.
Still waiting to hear back from J/Coppelia, who you appear to accept (and you would be right!) is the same person… she seems to have gone very quiet all of a sudden.
@The Lady Vanishes: fair enough!
@ LadyVanishes *sigh* I am stewing in silence, a black –clad, black-eyed huddled version of my former self “J”. Without hard facts you create a vacuum for intolerance to thrive and assumptions to flourish. I am not some Fine Gael mouthpiece plotting the demise of BS, nor am I associated with any publication .If you wish to peddle such hokey cokey, be my guest. It is much more interesting than the reality of the sphinx at her desk, amusing herself by throwing out innocuous one-liners/ linking articles of interest/ questioning the cult of conspiracy V the harsh reality of a system /or badgering Bodger. THE END
But you did write about Broadsheet offline? Under a name beginning with J, then changed to another name beginning with J. The article is no longer up (it was taken down around the time of the Apple post above) but there was a Broadsheet post on it which is still up…
Nope. I am not a journalist!
But you do badger Bodger rather a lot? Why is this?
I like to bend the spoon that feeds comedy.
@Coppélia: Badger Bodger? Bugger Bognor!
:) *throws bouquet* @ Neilo
WOW !
Where does BS support either candidate? I don’t believe I’ve seen a single post supporting either.
Also, can you give just one example of these to back up the claim, I’m sure I’m not the only one curious as to where you have found these positions taken by BS – “the new Broadsheet editorial position is to support misogyny, sexual assault, racism, bigotry, etc, and blindly fall behind Assange and Trump ” Looking forward to your examples.
Frankly Clampers, a lot of these comments read like they are from someone writing for a rival publication. They are part of a pattern which I have been observing for some time. Digs at Bodger, the Broadsheet readership, editorial policy on Broadsheet. From Rotide, whose own name is ‘editor’ spelt backwards, and a couple of others, under different usernames, who chime in to support him constantly. I think it’s two or three people, with an agenda, and they are associated with another, largely disregarded publication with a pitifully small web presence. Their writing styles are quite distinctive. I won’t mention the name of the publication but all I will say is that Bodger must have the tolerance of a saint to put up with their nonsense. As a commenter and non-contributor, however, I am not limited by the same constraints…
https://www.youtube.com/watch?v=mxu-Qz_v_7Q
My money is on the Broadsheet whisperer.
I’m not affiliated to anyone, either commentator or other publication. I have been an inconsistent poster for a number of years.
“Also, can you give just one example of these to back up the claim, I’m sure I’m not the only one curious as to where you have found these positions taken by BS – “the new Broadsheet editorial position is to support misogyny, sexual assault, racism, bigotry, etc, and blindly fall behind Assange and Trump ” ”
As explained in other posts, specifically the John Kerry posts, it is the posting of articles from Alt-Right sources that is the problem, not the the anti-HC position, not the discussion of the emails or other leaks.
Bodger has been named as it is they who tend to post these. These are sources who are pro trump, these are sources who mounted the gamergate campaign, these are people who up until recently would never have been featured on BS unless it was to comment in opposition to them. Now their videos and links are posted without comment and always under HC information.
Example was just last week where Bodger posted a video of Trump “Destroying Clinton” in tat the recent roast. No sane person could have thought Trump destroyed anyone in that, especially not the entire crowd who were booing. Yet a video, by a clear Trump supporting Alt-Right individual was posted as news. Nothing else. No video of Clinton. No news sources providing reports of the incident (all who were actually there), just a BS post that Trump Destroyed Clinton.
If it was done in irony, fair enough, except for that we’d require something of a wise crack, not just a post.
The other way to check is to look at the tags, those for Clinton and those for Trump on the posts and compare which ones are the most negative. How many ranting youtubers are used in the negative posts about Trump? Yet there are a lot against Clinton.
BS rarely has an editorial position, as a long term reader I am well aware of this, but the reliance on dubious Alt-Right sources for criticism of Clinton leaves a big question mark. It’s the same “balanced” approach this site has, in the past, criticised RTE for. In debates on abortion, gay marriage, etc where RTE has found the most abhorrent “opposite” voice just to provide balance. Except at least RTE provided a sane voice among the panels, at least there was one speaking sense.
Then there’s the retweets of wikileaks. No checking of the validity, just a retweet. And not all tweets, just the anti-HC ones.
That’s where the problem is. If it were just the emails and criticism, there’d be some argument. But even there, the email posts reference Alt-Right commentators. That’s an issue, that’s a problem. But it is more than that as it isn’t just the emails, it is anything anti-Clinton. The roast. The debates. The “expose” on election rigging, all from sources under no other circumstances would BS support. No mention of republican election rigging for the last 5 years. Nope, just a very dubious video from the discredited Jim O’Keefe (who was paid by Trump according to Trump’s own finance data) and is a regular of Breibart. The owner of which is Trump’s campaign manager.
All that and when someone used the hashtag #anarchistsfortrump bodger +1 it. Which seems like an endorsement.
It actually is possible to not support HC and not fall into the trap of constant posting of the paranoid Alt-Right. It is possible to oppose Clinton and not sell out your deeper moral core on misogyny, abortion, refugees, racism, by promoting the voice of those who in all other circumstances we wouldn’t give the time of day to, let alone post their paranoid rantings here.
“I’m not affiliated to anyone”
sure your not..
@ Neilo .I shall dine out on that compliment . Thank you :)
The fact that the life buoy around her neck does NOT say ‘The sheer unfathomable awfulness of Trump’ shows that the cartoonist doesn’t quite get what’s going on here.
Julian has gone full Rothschilds. Always a bad sign.
https://mobile.twitter.com/wikileaks/status/789882885742419968
Its only a matter of time before the Jews controlling the media will be blamed.
Media collusion with Clinton’s? Hang on a sec, Trump is a regular on Fox news (using the word loosely here). His rise was supported by media, his rallies shown in their entirety. It was estimated that the exposure he received was worth over $2 billion.
The US media is far from neutral on the candidates, both have their supporters.
Apart from the late night talk shows of course. Trump is writing their material for them and is beyond satire at this stage.
….and CNN is know as the Clinton News Network, they both have their mouthpieces when it comes to news organisations.
Are we living in a post-conspiracy theory world when American Royalty talk openly about the Russians controlling American elections?
Every godawful conspiracy in the darker corners of the internet has bubbled up to the surface in this election
But the Russians really have hacked DNC emails, used wikileaks to make them public.
Can. not. wait. until its over.
Sure if the Russians wanted to influence American politics – wouldn’t it be easier and cheaper just to give a donation to the Clinton Foundation?
What rubbish why would Russia hack the dnc?
(mossad)
I don’t know if they actually did but if it’s true probably because a Clinton presidency poses a greater threat to Russia than a Trump presidency.
Does anyone ( apart from Bodger ) take Jules “conceived in a petri dish” Assange seriously ?
He highlighted the sheer extent of electronic surveillance and did the world some good.
His refusal to answer allegations of rape in Sweeden and holing himself up in an embassy for years has not done him any PR favours.
The one sided nature of the the wikileaks has shown that he’s not a neutral 3rd party , just passing on info.
Clinton asked if he could be droned. She wasn’t kidding.
“He highlighted the sheer extent of electronic surveillance and did the world some good.” That was Snowden.
And Snowden passed his info to the Guardian and other journalists so it can be released in a manner secure for sources.
Assange just dumps everything online, consequences and people be damned.
The issue is not whether you like the leaker. Or if you have unresolved issues with Broadsheet editorial. Or if you hate Trump. The issue is what the leaks say about Clinton. Everything else is irrelevant
Errol, haven’t you got the memo? This is the post where ‘real’/connected enough to get a job leaving them time to comment extensively on the ‘sheet get to take out their frustrations on life/men/obscurity by criticising Trump/Bodger/’sheet editing instead of proofing their piff-poor copy for obvious typos…
Yeah. All this Bodger-baiting is the commenting equivalent of a wedgie or a snapped bra-strap. You want notice then raise the game with your commenting standards.
Or alternatively focus on publishing yr own stuff.
Oh.
Interesting you see the Guardian as some sort of moral arbiter, rather than as an intellectual ghetto and SJW hugbox
I agree all these clowns seem to think the guardian is some sort of liberal bastion fighting for people’s freedoms and Glenn Greenwald is its sword, both are frauds, so is snowden and so is assange.
All assets for mossad, nothing bad released/published on either Israel or trump
Sido – “Interesting you see the Guardian as some sort of moral arbiter, rather than as an intellectual ghetto and SJW hugbox”
I see the Guardian as a filter. It’s as much of a turd as any other news outlet online, but any filter is better than none in relation to leaks.
Yeah
Your just sore because of the Hillary bashing
If Clinton announced tomorrow she was going to arrest anyone who supports Trump and put them in forced labour camps all the rabid lefties above would still support her.
That’s where we are folks. Pathetic.
#anarchistsfortrump
Unlike Trump who has already said he would set up a deportation force to remove 11 million emigrants from the US? Who has already said he would get a special prosecuter to jail her?
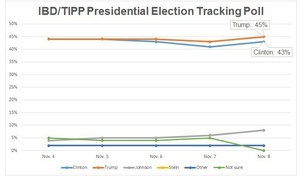
And he’s still about 40% of the vote.
Keith Olberman puts it better than I can:
https://twitter.com/KeithOlbermann/status/790374165689823232
You mean like when Trump actually said he could shoot someone and not lose votes?
Or the deportation of Muslims (now with caveats of only certain types of muslims)
Or Syrian Refugees.
Or criminalising Gay marriage
Or criminalising abortion.
…that’s some left-wing anarchist agenda going on there.
thank god for anarchists.
Listrade your analysis is excruciating redundant and boring.
He does read like the artificially conceived lovechild of Rotide and Owen C tbf. What’s his name spelt backwards again?
So outlawing abortion and gay marriage is boring now is it?
So delivery doesn’t matter so long as the content’s right-on? Please.
@ Saturday Night Newsround
Absolutely no idea what that means.
@ SOQ maybe the Russians are hacking the dnc again, maybe your onto something
“Listrade your analysis is excruciating redundant and boring.”
https://youtu.be/yetwdpsiM8Q
family guy sucks maeve
Hillary doesn’t support gay marriage, she is willing to drop nukes on Iran/Syria and has been labelled a racist, your comparisons are redundant there buddy
Just making sure anarchist are comfortable with the agenda they support.
You throw round the term anarchist like my three year old nephew spits out mushy peas. Only not at all as appealingly. What’s your problem with transparency and freedom of expression? Both are far better protections against anarchy than your preachy, patronising and intellectually limited polemic against Broadsheet, Assange and anyone who doesn’t fit into your clique of socially maladjusted pseudo intellectuals.
In short, Rotide/Listrade/Owen C or whoever you want to posture as today, we civilians do not need you misbegotten misspelt hacks to save us from ourselves. If you feel like doing anything of use, shut up and save us – and you – from you!
I used anarchist because the hashtag #anarchistsfortrump was used by another poster (and +1 by bodger on another post). As on this post, I only referred to anarchist in response to that use.
As to other point, no I’m not against transparency. I don’t support Clinton either. What I object to is the posts against clinton where the only source is the Alt-Right. This has happened a lot on this site without any comment or clarification.
The hypocrisy comes in when BS supports so many worthy issues and has taken stands against the alt-right in the past (gamer gate, etc) yet feels it is ok to post their ranting YouTube clips without comment or irony.
All the work support repeal the 8th? Undone by supporting and linking to the very people who would gladly end planned parenthood, criminalise abortion and condone violence at abortion clinics.
It isn’t anarchy to support Trump, it is taking the views of the Alt-Right and validating them online.
This is the problem as expressed here and other posts. Plenty of sources provide criticism of Clinton, plenty. All fact checked, all valid, all negative. But the only sources here are the Alt-Right and pro-Trump.
Finally, BS often retweets wikileaks, again without comment, again giving the impression of support.
This is an organisation that has gone from assisting transparency with proper analysis through partner newspapers to publishing anything that comes its way, irrespective of source. Once it became clear that the media was giving credit to Snowdon, once it became clear that the media weren’t going to ignore the rape charges, Assange cut off all ties and operates on his own. He has openly lied about allowing Russia unlimited access to files he had. He dropped snowdon and left him stranded and alone.
Wikileaks and broadsheet are reweeting Alt-Right websites that are providing false analysis of the emails and claiming no media coverage even though NPR has covered every exposure in its podcast and openly criticised the HC campaign.
As an old anarchist I find the zeal to align with the agenda of Assange and Trump abhorrent and i find it hypocritical of everything Broadsheet has done in the past.
I support neither Trump nor Clinton, but I cannot sit here and see Alt-Right sources posted without criticism.
+1 on this entire thread to Saturday Night Newsround
Listrade…. “What I object to is the posts against Clinton where the only source is the Alt-Right. This has happened a lot on this site without any comment or clarification.” – examples of this please, as you say, there are lots, so it shouldn’t be hard to post them here, thanks.
When did BS take a stand in support or otherwise “against the alt-right in the past (gamer gate, etc)”?
I know BS posted non-gamer Sarkeesian’s Women v Tropes videos, but just posting a vid is not an endorsement… you do realise that don’t you? Examples would be good of you to provide which show ‘support’ or otherwise by BS.
It might help too if you explained what part of Gamergate you believe BS showed support for as it goes beyond Sarkeesian….
“Finally, BS often retweets wikileaks, again without comment, again giving the impression of support.”
WOW… that’s quite a revealing comment to make. That’s YOUR assumption, nothing more. You’re just telling us how you view things. Nothing more.
“Wikileaks and broadsheet are reweeting Alt-Right websites that are providing false analysis of the emails” – Please provide examples.
“and claiming no media coverage” – Examples please
“even though NPR has covered every exposure in its podcast and openly criticised the HC campaign.” Funny that the NPR sources of criticism are… “(alt-)right” wingers.
So, you seem to have no problem with right wing criticism info from NPR… Source: http://mediamatters.org/blog/2015/08/20/npr-story-on-clinton-emails-does-not-disclose-s/205074
“…I find the zeal to align with the agenda of Assange and Trump abhorrent” – OK, if BS has put “zeal” into this effort to “align” itself with Assange or Trump then there MUST be numerous examples because zeal requires a lot of energy and enthusiasm – lots of examples please.
Your rant is a list of accusations towards BS. I look forward to you showing evidence of BS having done what you say…. as opposed to BS just posting stuff from organisations you have a strong dislike for.
(Only spotting your comment above Listrade, in reply to me earlier, I’ll have a look at that and get back… when I have mo.
But before I go, on both this and the comment above, you repeatedly mention “Alt-right” sources, can you name these sources that BS is repeatedly posting from, thanks.)
Seriously Clampers?
The anti Hillary bang of BroadSheet these days is bordering on the comical. And as for the Alt-Right they are not the ‘new punk’, they are far from it as is possible to get.
New Jack boots maybe.
I think your pro Hillary commentary is comical SOQ
“The anti Hillary bang of BroadSheet these days is bordering on the comical.” that’s funny in fairness.
“And as for the Alt-Right they are not the ‘new punk’” – who in their right mind, no pun intended, would think that? Why did you think it?
My God that insane hypothetical you completely made up suddenly makes Trump look reasonable!
…we are endebted to WikiLeaks yet again for exposing crooked Hilary…you feel sorry for the people in the US with this choice…but on the bright side, they gave us Bob Dylan and Nasa…
What exactly was exposed?
That she gets paid well for speaking to bankers? That she admits being out of touch with middle class Americans? that she’s useless with email?
As for “crooked”, the name Trump uses for her – he didn’t pay for for work done on his buildings, lost money in the casino business, has been sued over 3,000 times as well as being a generally hideous human being.
…you’re right of course…I should have said ‘futher exposing crooked Hilary’…
…ooops…’further’ not fuhrer crooked Hilary…
You forget jumping in during the boom with a sub-prime mortgage company and then profiteering after the economic collapse in the property market by those made homeless. Then bragging about it at a debate as showing he’s good at business.
Hillary gave speeches to the Bankers, he was part of the establishment that created and then profited from the problem. Remember that Broadsheet article? Good Times.
But then I’m not an anarchist. I’m blinded by a lack of hypocrisy.
Blinded by a lack of hypocrisy?
Nice objective self-evaluation there.
So, so boring.
theyre both awful options for pres .. Trump for obvious reasons, and Hilary for her deeply set corruption and war mongering.
+1 smartest comment so far
As yourself this question: If it was the case that Assange was not hold up in London, would he be doing what he is doing? The timing is designed to create maximum harm to The Democrats. He is no longer an impartial player. He is destroying whatever credibility he had left with this behaviour.
Oh no the democrats they’re being hacked so unfair
Yes it is, How come the same is not happening to the Republicans or do you believe that their brand of anti Christian puritanism is somehow more acceptable?
fDuck the personalities. Get real people. If you are intelligent as you think you are then wake up to the fact that you enemies enemy is NOT your friend.
* Anti everything. Looks like everything between forward and backward arrows means something else on here.
Yea wake up sheeple join the snowflakes in supporting Hillary because she’s a woman
Wikileaks have proven to be lunatics. Anti women and anti their original focus. Broadsheet retweeting their tweets? No thanks.
They have uncovered some good facts but have gone on to be pushing an agenda.
Odd.
ugh can we just drop this already, no one cares about what President Hillary Clinton has done in the past she is woman and a democrat she will be the greatest president in history trump makes crude comments about women and wants to make it difficult for people to illegally enter the united states he is literally hitler.
Trump is being sued for raping a 13 year old child this month. His wife Ivana said he “violently raped” her under oath. Actual Nazi groups are organising to support Trump. I realise you’re being sarcastic but you look a little silly here.
+1
Merciful hour – who are all these idiots posting here?
Bit of pruning seems to have gone on here.
Quite the rubbish little soap opera.
(PS This is stage 4, terminal decline.)